Origine de l’idée
Pour mon premier quadcopter, j’ai acheté un châssis pas trop cher: le x525. Un châssis de 60 cm d’envergure de moteur à moteur. C’était un type châssis assez populaire avec une dimension ‘standard’. Et c’est vrai qu’avec cette taille on s’attend à avoir assez de place sur la plateforme centrale; seulement avec une plaque de 12×12 cm, on se retrouve vite à l’étroit. Une fois qu’on a réussi à installer les 4 ESCs (variateurs de vitesse), le contrôleur de vol et le récepteur, il ne reste pas grande place pour une caméra et un système FPV (vol en immersion). C’est à ce moment là que commence l’optimisation pour tout faire rentrer, ce qui donne un montage super propre où chaque élément à sa place. Sauf que quand on commence, notre œuvre d’art s’écrase assez fréquemment, et là…c’est la grosse misère pour réparer le moindre truc.
En plus, ce type de châssis est en fibre de verre et donc se casse assez facilement lors de crash, en particulier les pièces sensibles comme les patins d’atterrissage et les supports moteurs. En fait, le gros problème c’est que les parties en fibre de verre ne sont pas capables d’absorber l’impact à cause du poids trop élevé de l’ensemble (> 1 Kg). Et bien évidemment pour les réparer, il faut avoir des pièces de rechange en stock ou alors les commander et attendre 3 semaines pour qu’elles arrivent. Enfin…vous connaissez sûrement le problème.

Donc même en ayant un bon stock de pièces de rechange, ça a fini par me gaver. À ce moment là, j’ai eu deux choix : Changer la fibre de verre pour de la fibre de carbone plus solide, ou redesigner un châssis plus simple, facile à réparer et avec des matériaux que je pouvais trouver partout.
C’est sûr que la seconde solution est plus complexe et implique beaucoup plus de défis, alors que la première solution est juste plus chère !
Étant un amoureux des défis, j’ai opté pour la solution la plus intéressante.
Définition des exigences
Avant de se lancer dans la construction, esquissons un simili cahier des charges pour ce nouveau châssis :
- Faible coût
Un truc pas trop cher parce qu’on va s’en servir pour apprendre ou s’entraîner donc il va se crasher régulièrement. - Solide
Oui, on va l’écraser, mais on ne va pas le réparer à chaque fois quand même. - Simple
Simplicité, mais pas simpliste. Plus le montage est simple, plus il est facile à réparer, et à assembler. - Léger et transportable
Le poids est important, car il joue sur la durée maximum du vol et sur la force appliquée sur châssis au moment de l’impact.
Transportable… pourquoi pas ! - Résistant aux intempéries
Ici, je vous parle de météo. Vivant au Canada où une année se compose de 6 mois de neige, 3 mois de pluie et 3 mois de soleil, il est primordial d’avoir un montage résistant aux intempéries afin de voler plus de 3 mois par an. Donc oui, ce quad sera résistant à l’eau !
Beaucoup de promesses ? Et bien pourtant ce quadcopter existe, et pas seulement dans ma tête…
Voyons comment satisfaire toutes ces exigences.
Poids
Le poids est un critère important qui est difficile à satisfaire avec des matériaux peu chers. Et c’est certain qu’on ne peut pas compétitionner avec la fibre de carbone, car son ratio solidité-poids est excellent. Mais on peut trouver des matériaux qui satisfont nos exigences : Aluminium ou bois.
Au début, j’avais opté pour l’aluminium pour sa légèreté et sa grande solidité, mais le souder est très compliqué (pour moi) et demande des outils bien spéciaux. Oui, il y a toujours l’utilisation de visserie pour s’exempter de soudure, mais les vis sont du poids supplémentaire. Sans oublier que l’aluminium est souvent plus cher que le bois.
Le bois, il y en a des dizaines de sortes dans nos magasins, mais ils ne sont pas tous recommandables pour l’utilisation qu’on veut en faire. Bien souvent le bois est plus élastique que d’autres matériaux, donc il nous faut un type de bois pas trop souple, léger et solide. Petite remarque avant de continuer, ici je ne parle pas de bois modifié, laminé ou recomposé, je parle de bois brut.
Le pin et le peuplier sont deux bois assez rigides et pas trop lourds. Le peuplier est plus léger que le pin, mais le pin est plus solide.
Densité moyenne du peuplier : 4,55×10-4 g/mm³
– Soit 455g un cube de 10x10x10 cm
Densité moyenne du pin : 5,45×10-4 g/mm³
– Soit 545g un cube de 10x10x10 cm
Pour le châssis, j’ai choisi le peuplier, car j’ai trouvé des morceaux qui me permettaient de faire au moins 2 châssis complets pour 10$. Il faut rajouter 5$ de plus pour la visserie si vous n’avez pas déjà ce qu’il faut. Pour info, le calcul de densité du morceau que j’ai acheté me donne 5,5×10-4 g/mm³, soit proche de celui du pin.
À ce stade, on a satisfait plusieurs exigences du cahier des charges :
- Solide
- Léger – à confirmer selon la taille finale
- Faible coût
Taille
Il nous faut un châssis pas trop grand pour qu’il ne soit pas trop lourd, mais assez grand pour contenir toute l’électronique. Je me suis grandement inspiré des quadcopters de courses qui sont assez compacts, légers et embarquent tout ce qu’il faut pour faire du FPV. Le QAV250 est un bonne exemple, et il entre dans la catégorie des racers.

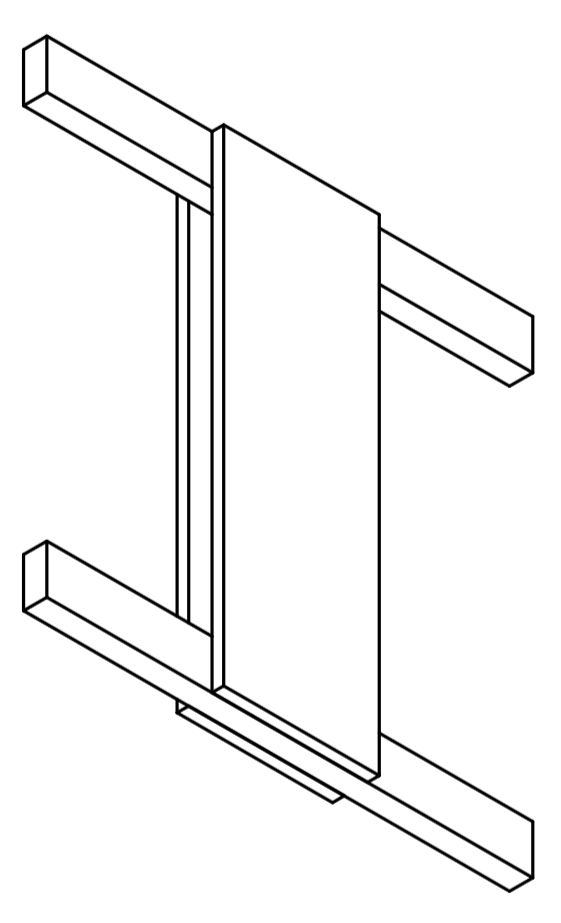
Ce qui nous place dans la catégorie des quadcopters de 25 cm d’envergure. Mais je vous avoue tout de suite que pour respecter notre prérequis de place et de simplicité, ce ne sera pas un véritable 25 cm de diagonale, mais plutôt 32 cm. Afin de maximiser la place disponible, le châssis sera de type H, comme la plupart des quadcopters de courses d’ailleurs.

Afin de simplifier les plans et que chaque morceau soit interchangeable, le châssis est construit sur un carré de 250 mm de coté, et se compose de 4 morceaux :
- 2 bras de 250x25x12 mm
- 2 plateformes de 250x80x6 mm
L’épaisseur des planches peut sembler un peu étrange, mais c’est parce qu’elles sont des multiples du pouce impérial (1 in = 2,56 cm). Si vous avez des planches en métrique, vous pouvez arrondir les épaisseurs à 10 mm pour les bars et 5 mm pour la plateforme.
Les planches que j’ai utilisées ont les dimensions suivantes :
- Pour les bras : ½x2x4 inch
- Pour les plateformes : ¼x6x4 inch
Voyons maintenant le poids du châssis sans visserie :
- Bras : 75 000 mm³
- Plateforme : 120 000 mm³
- Total (2 bras + 2 plateformes) : 390 000 mm³
Pour une densité moyenne de 5×10-4 g/mm³, on obtient une masse moyenne de 200g.
Cette fois, le châssis satisfait aux exigences de simplicité et de légèreté. De plus, je considère le châssis transportable puisqu’il entre parfaitement dans la mallette de transport de ma télécommande FrSky Taranis.
Assemblage
Ici, je vais rapidement vous introduire le montage du quadcopter pour vous démontrer la simplicité de l’ensemble.
Donc nous avons à notre disposition 4 pièces qui en réalité sont 2 paires : une paire pour les bras et une paire pour la plateforme. De plus, ces paires sont interchangeables, c’est-à-dire qu’il n’y a pas de modèle de bras avant-arrière ou gauche-droite. Le même modèle est utilisé pour l’avant ou l’arrière, et c’est aussi valide pour la plateforme.
Si vous avez déjà vu des quadcopters avec des châssis en H, vous vous doutez sûrement à quoi va ressembler le montage. Oui, c’était prévisible, mais il faut bien concéder que le montage est d’une simplicité accablante. C’est quand même bien plus simple que de monter un meuble Ikea !
Mais avant d’assembler les pièces, il faut les fabriquer. Ce n’est pas très mystérieux non plus, mais je traiterais la fabrication en détail dans la seconde partie de cet article.
Résistance à l’eau
Pour vraiment faire le tour de toutes les exigences fixées en introduction, parlons rapidement de cette fameuse résistance aux intempéries. Alors oui c’est possible, et je vais vous monter comment le faire assez facilement. Cette protection s’appliquera sur l’électronique embarquée dans le quadcopter, soit le contrôleur de vol, les variateurs de vitesse, le transmetteur, et le système de FPV. Et non je ne parlerai pas des moteurs puisque les moteurs brushless ne craignent pas l’eau !
Appliquer correctement cette protection est un exercice qui demande un peu de minutie et de la patience (mais pas trop quand même, faut pas déconner !). Et comme c’est un sujet riche, je le développerai dans la troisième partie de l’article. À cette occasion, je couvrirai aussi comment protéger le châssis en bois de l’eau.
Caractéristiques finales
Avant de se lancer dans la fabrication du châssis, voyons quelles seront les caractéristiques techniques du quadcopter que je m’apprête à vous présenter.
Je vous l’ai dit plus tôt, le multicopter est proche de la catégorie des racers (ou quadcopter de course) avec une envergure de 250 mm. Cette dimension limite la taille des hélices à 6 pouces max (ou 150 mm). Donc seules les hélices de 5 ou 6 pouces seront compatibles avec ce modèle. Vu la taille des hélices, on sait dès lors qu’il faudra des moteurs à vitesse élevée du genre 2300 Kv. Petite digression : Kv est la constante de vitesse du moteur, elle représente le nombre de rotations par minute par volt appliqué sur le moteur à vide, d’où l’unité :RPM/v. Ainsi, pour 10 volts appliqués aux bornes du moteur à vide (sans hélice), on obtient 23000 tours par minute.
Sachant que nos moteurs devront développer une vitesse élevée, le courant demandé sera plus faible qu’un moteur dimensionné pour tourner moins vite et qui produirait alors plus de couples. Pour ce type de moteur, on ne se trompe pas si on estime à 20A de consommation instantanée max par moteur. Au vu des moteurs que je vais conseiller, je peux vous dire par avance qu’on est en dessous de 12A. Ce qui n’est pas plus mal, car une consommation plus faible signifie un temps de vol plus long !
En parlant de consommation, parlons de la batterie. La batterie est l’élément souvent le plus lourd sur un quadcopter, donc il faut bien la sélectionner. Il y a deux choses à regarder : la tension souhaitée et la capacité. En terme de tension, les quadcopters de cette taille tournent avec des batteries 3S ou 4S. Petite digression : Dans cette notation, le chiffre détermine le nombre de cellules dans la batterie, sachant qu’une cellule a une tension nominale de 3,7v. Ainsi une batterie 3S aura une tension de (3 x 3,7v) 11,1v alors qu’une batterie 4S produira 14,8v. Les batteries 4S sont souvent utilisées pour survolter les moteurs dans le dernier quart du throttle, cela permet d’augmenter la sensibilité et la réponse du quad. Donc pour commencer, je conseille une batterie 3S. En plus, les 4S ont une cellule supplémentaire donc pour le même poids avec une 3S vous aurez une capacité plus élevée. D’ailleurs, la capacité de la batterie va déterminer le temps de vol max. Avec une capacité de 2,2Ah, on arrive facilement à dépasser les 10 minutes en vol stationnaire. Mais si vous êtes un peu plus actif, ça tournera autour de 5 à 7 minutes. Ce qui est à peu près dans la moyenne.
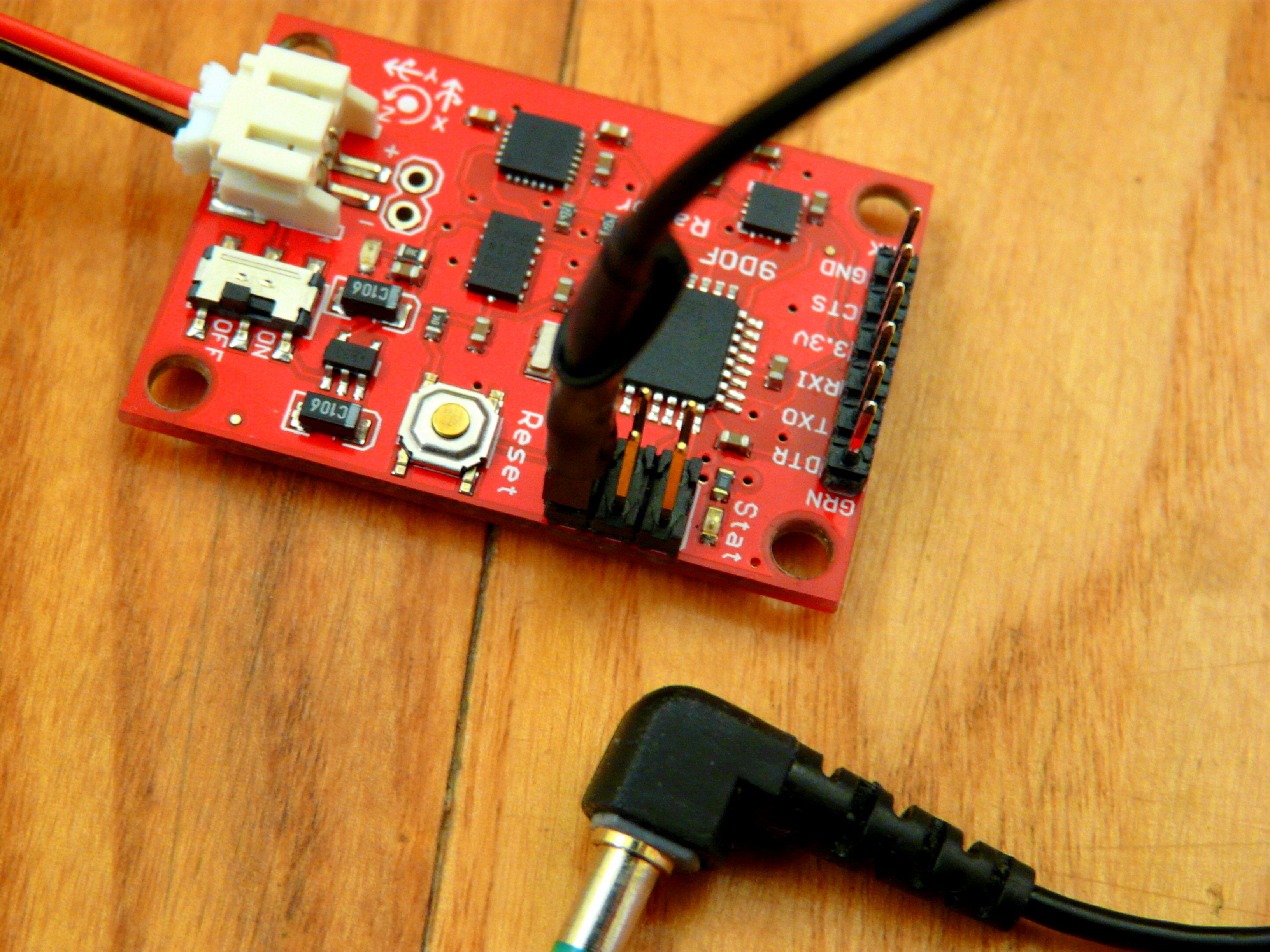
Pour ce qui est du contrôleur de vol et du système de transmission, c’est à vous de faire vos choix, puisque le châssis pourra sûrement les supporter. Personnellement, pour ce quadcopter, j’ai pris un contrôleur Naze32 Acro pour ça taille et son prix. Tandis que le système de transmission est un FrSky DR4-II configuré en PPM (Pulse-Position Modulation) afin de réduire le nombre de fils.
Petit résumé des pièces choisies:
| Pièce | Désignation | Qt | Prix unitaire ($) | Prix total ($) |
| Contrôleur de vol | AfroFlight Naze32 Acro | 1 | 25 | 25 |
| Transmetteur | FrSky DR4-II | 1 | 20 | 20 |
| Variateur de vitesse | Afro ESC 12A | 4 | 10 | 40 |
| Moteur | DYS BE1806-13 2300Kv | 4 | 10 | 40 |
| Hélice | Gemfan 6030, 1 pair | 2 | 1,5 | 3 |
| Batterie | Turnigy 2200mAh 3S 25C Lipo | 1 | 9 | 9 |
Petite astuce : Si vous décidez de vous lancer dans l’aventure, n’achetez pas seulement 4 moteurs ou 4 ESCs, achetez-en 5, voir 6. Et pour les hélices au moins 8. En bref, prévoyez des pièces de rechange !
Suite de l’article:
- Fabrication et montage: à venir…
- Traitement d’imperméabilité: à venir…